domenica 30 dicembre 2018
mercoledì 19 dicembre 2018
Sismografo sperimentali - Il trigger
Per sismica a rifrazione e riflessione ,
MASW, REMI, ESAC e tomografia sismica
Il progetto è superato
lo schema è ancora più semplice

seguirà un terzo prototipo ancora più semplice e meno costoso da realizzare.
Parte 2° IL TRIGGER
in questa seconda parte ci occuperemo del trigger elemento fondamentale per sincronizzare l'inizio dell'acquisitore con la mazzata di starter
Campo di sperimentazione
foto di Simone Sette

Per eseguire le sperimentazioni occorre un luogo come questo
1) immerso nella natura
2) assenza di rumori antropici
3) pianeggiante e privo di asperità morfologiche
4) stratigrafia senza inversioni di velocità e omogeneo in senso orizzontale
5) suolo soffice per permettere di approfondire gli spyke dei geofoni senza fatica.
6) un suolo sufficientemente morbido per fissare i geofoni
primo prototipo di sperimentazione 6 canali
foto di Simone Sette

La strumentazione sarà costituita da 2 - 3 cavi a 6 canali per ottenere 12- 18 cnali, andare oltre potrebbe essere inutile ma possibile.
Ogni cavo sarò autonomo , costituito da
6 geofoni ( meglio se da 4,5 hz)
6 dviatori per geofono, 2 -3 cavi USB,
6 geofoni con bracciolo da 1m.
1 scatola per ogni cavo contenente theremino ed amplificatori
1 piastra in alluminio
2 - 3 avvolgitori piccoli per il cavo
1 - 2 rotelle metriche
1 bauletto per contenere tutto il materiale
1 tablet window da 100 euro con monitor > 8 pollici meglio se > di 10 e/ o pc o pc-tablet
sondaggio eseguito da Simone Sette

Prima traccia geofono start con gain 40
28-09-2015
Spesso si usa come starter il geofono fidandoci che inneschi il processo di acquisizione nell'esatto istante in cui si è dato lo start, non sempre la cosa è sempre vera.
Si consiglia di provare il sistema prima con uno starter ON / OFF poi con il geofono per vedere se il tempo del primo arrivo è sempre lo stesso, consiglio di dare mazzate deboli, medie , forti e fortissime per verificare che i tempi siano sempre gli stessi
Come funziona ?
il geofono quando è in quiete genera un segnale di ampiezza molto piccola, quando viene eccitato da una mazzata produce segnali di ampiezza elevata mandando spesso in saturazione il segnale se non ben regolato.
Il funzionamento è quello di sfruttare questa proprietà, quando il segnale supera il valore di soglia il software se ne accorge e da l'ordine al sismografo di far partire la procedura di acquisizione, nel caso contrario rimane in attesa.
Senza addentrarci nelle diverse tecniche utilizzate nel gestire via software o via hardware lo starter, l'operatore deve conoscere i limiti del metodo per non rischiare di ottenere risultati errati.
Importante è in valore di soglia che determina il valore in cui deve avvenire lo starter dell'acquisizione, se ci riferiamo alla figura precedente traccia superiore che mostra il grafico dell'andamento del segnale generato da un geofono eccitato da una mazzata posizionato nelle vicinanze della piastra di battuta si possono ipotizzare diversi comportamenti.
1) ipotizziamo ( caso rarissimo ) dove il rumore ambientale = 0, e di aver impostato il valore di soglia = 0,01, nell'esatto istante in cui si a da mazzata scatta la procedura di acquisizione come si vede in figura ( tacca rossa )
Il geofono posto ad una certa distanza evidenzierà il primo arrivo delle onde P dopo un certo intervallo di tempo dT che è quello trascorso dall'istante 0 e il tempo Tr ritardo.
Per eseguire questa prova nel software è stato inserito un pretrigger che mostra il segnale prima dello starter ( parte sinistra della linea rossa )
caso 2) normalmente il rumore di fondo del sito non avrà mai un valore = 0 , i microtremori ce lo insegnano, quindi se imponiamo un il valore di soglia indicato nel caso 1 di 0,01 avviata la procedura di attesa della mazzata al primo tremolio del terreno avviene il superamento della procedura di acquisizione senza aver dato la mazzata rendendo nulla l'acquisizione fatta.
caso 3) Nel caso della figura precedente dovessimo impostare un valore di soglia pari a 15, valore superiore almeno di 5 volte del rumore ambientale che varia nell'esempio varia tra +/- 2 avremo l'avviamento dell'acquisizione ma con un piccolo ritardo valutabile fra 1 e 5 millisecondi, tale errore produce una sottovalutazione del tempo di arrivo della onda P, di conseguenza una sovrastima della Vp.
caso 4) Nel caso in cui la parte positiva dell'esempio fosse stata quella rivolta verso il basso e con valore di soglia = 30 si ottiene un tempo di starter errato che genera un errore grossolano nella determinazione del tempo T0, il dT si sarebbe praticamente dimezzato rispetto al dT reale con conseguente sovrastima della vs anche in questo caso.
caso 5) A livello di software e in maniera più complicata a livello di Hardware è possibile usare il modulo del valore di soglia, ciò permette al trigger di funzionare anche con polarità invertite del segnale di starter.
Se la polarità dei geofoni nei casi 1 - 4 fosse stata invertita, usando i valori di soglia precedentemente indicati non avrebbero fatto partire l'acquisizione in quanto un valore -30 , ad esempio, non avrebbe soddisfatto le condizioni di avvio dell'acquisizione.
Usando il modulo ciò viene resa possibile ma senza migliorare il risultato finale
caso 6) aumentando a 60 il valore soglia , è evidente che ci troviamo in una condizione sempre peggiore a quelle precedenti il tempo To sarebbe maggiore al tempo di arrivo del segnale registrato dal geofono con conseguente perdita della parte iniziale del segnale.
caso 7) L'ultimo caso è duello di usare un valore di soglia più alto del valore massimo prodotto dal geofono starter, in tal caso l'acquisizione non parte in quanto la relazione che avvia l'acquisizione non viene verificata.
Come si è visto i migliori dati si hanno quando il valore di soglia si pochissimo il rumore del sito quel tanto che basta per far scattare il trigger a causa di un rumore antropico.
Per migliorare la funzionalità del geofono trigger è possibile inserire un circuito che abbia il compito , facendo ruotare una manopola per regolare la sensibilità del trigger in modo da evitare partenze dell'acquisizione, in tutti i casi ciò fa comportare uno delle problematiche dei casi 2-7 precedentemente descritti.
Quanto detto va contro a quanto spesso viene consigliato di dare la mazzata vicino al geofono che si vuole usare come punto di start, in particolare per la mazzata centrale che si solito va data tra il 6 e 7 geofono.
Non è possibile neanche settare il trigger per determiati valori di soglia perchè dipendono
1) dalla caratteristiche del geofono - sensore usato
2) amplificazione e sensibilità del sistema usato
3) intensità della mazzata
4) rumore ambientale
5) energia sviluppata del mezzo battente ( forza applicata )
6) tipo di terreno
7) tipo e dimensioni della piastra
8) distanza dal centro della piastra e il geofono
9 valore di soglia impostato
10) sall'algoritmo utilizzato per gestire l'evento a livello Hardware che software
11) .......... altro ...............
Per ottimizzare ciò occorrono algoritmi software (che penso non vengano utilizzati nei normali strumenti) che eseguano test e verifiche in fase di acquisizione e l'individuazione del vero istante T0 con l'analisi post acquisizione del dato prima della sua visualizzazione, saranno tecniche sperimentate nel programma di acquisizione, in pratica occorre realizzare un " triggeraggio intelligente".
Anche se in maniera meno evidente tutti le tecniche do triggeraggio chi più e chi meno hanno questi problemi più o meno evidenti, per tanto tecniche di triggeraggio intelligenti possono ridurre i margini di errore.
CASO 1) start contatto mazza piastra , il dt massimo è pari al tempo di campionamento del dato acquisito
CASO 2 start eseguito con geofono starter, il grafico fa vedere che lo starter con geofono ha un ritardo dT rispetto all'analogo test eseguito con il contatto meccanico piastra - mazza.
Nel caso di utilizzo di starter piezoelettrici esiste un dT , ma in questo caso molto più piccolo di quello ottenuto con un geofono trigger
Seconda traccia - 5° geofono a distanza di una quindicina di metri dal punto di battuta,
durata di acquisizione 1500 m.sec secondi, frequenza di campionamento 1000 hz.
28-09-2015
Spesso si usa come starter il geofono fidandoci che inneschi il processo di acquisizione nell'esatto istante in cui si è dato lo start, non sempre la cosa è sempre vera.
Si consiglia di provare il sistema prima con uno starter ON / OFF poi con il geofono per vedere se il tempo del primo arrivo è sempre lo stesso, consiglio di dare mazzate deboli, medie , forti e fortissime per verificare che i tempi siano sempre gli stessi
Consiglierei lo starter Piezo che da valori bassi sempre e supera il 500 solo durante il colpo.
In questo modosi potrà usare un qualunque input digitale ( DigIn )
che è valido per tutti i PIN di tutti i moduli (anche fino agli 11 e 12 dei nuovi master)
In questo modo con n° 2 Theremini è possibile realizzare un 12 canali in quanto come canale trigger può essere utilizzato il pin 7,8,9,10,11,12 deni nuovi master > V 4.0
Come funziona ?
il geofono quando è in quiete genera un segnale di ampiezza molto piccola, quando viene eccitato da una mazzata produce segnali di ampiezza elevata mandando spesso in saturazione il segnale se non ben regolato.
Il funzionamento è quello di sfruttare questa proprietà, quando il segnale supera il valore di soglia il software se ne accorge e da l'ordine al sismografo di far partire la procedura di acquisizione, nel caso contrario rimane in attesa.
Senza addentrarci nelle diverse tecniche utilizzate nel gestire via software o via hardware lo starter, l'operatore deve conoscere i limiti del metodo per non rischiare di ottenere risultati errati.
Importante è in valore di soglia che determina il valore in cui deve avvenire lo starter dell'acquisizione, se ci riferiamo alla figura precedente traccia superiore che mostra il grafico dell'andamento del segnale generato da un geofono eccitato da una mazzata posizionato nelle vicinanze della piastra di battuta si possono ipotizzare diversi comportamenti.
1) ipotizziamo ( caso rarissimo ) dove il rumore ambientale = 0, e di aver impostato il valore di soglia = 0,01, nell'esatto istante in cui si a da mazzata scatta la procedura di acquisizione come si vede in figura ( tacca rossa )
Il geofono posto ad una certa distanza evidenzierà il primo arrivo delle onde P dopo un certo intervallo di tempo dT che è quello trascorso dall'istante 0 e il tempo Tr ritardo.
Per eseguire questa prova nel software è stato inserito un pretrigger che mostra il segnale prima dello starter ( parte sinistra della linea rossa )
caso 2) normalmente il rumore di fondo del sito non avrà mai un valore = 0 , i microtremori ce lo insegnano, quindi se imponiamo un il valore di soglia indicato nel caso 1 di 0,01 avviata la procedura di attesa della mazzata al primo tremolio del terreno avviene il superamento della procedura di acquisizione senza aver dato la mazzata rendendo nulla l'acquisizione fatta.
caso 3) Nel caso della figura precedente dovessimo impostare un valore di soglia pari a 15, valore superiore almeno di 5 volte del rumore ambientale che varia nell'esempio varia tra +/- 2 avremo l'avviamento dell'acquisizione ma con un piccolo ritardo valutabile fra 1 e 5 millisecondi, tale errore produce una sottovalutazione del tempo di arrivo della onda P, di conseguenza una sovrastima della Vp.
caso 4) Nel caso in cui la parte positiva dell'esempio fosse stata quella rivolta verso il basso e con valore di soglia = 30 si ottiene un tempo di starter errato che genera un errore grossolano nella determinazione del tempo T0, il dT si sarebbe praticamente dimezzato rispetto al dT reale con conseguente sovrastima della vs anche in questo caso.
caso 5) A livello di software e in maniera più complicata a livello di Hardware è possibile usare il modulo del valore di soglia, ciò permette al trigger di funzionare anche con polarità invertite del segnale di starter.
Se la polarità dei geofoni nei casi 1 - 4 fosse stata invertita, usando i valori di soglia precedentemente indicati non avrebbero fatto partire l'acquisizione in quanto un valore -30 , ad esempio, non avrebbe soddisfatto le condizioni di avvio dell'acquisizione.
Usando il modulo ciò viene resa possibile ma senza migliorare il risultato finale
caso 6) aumentando a 60 il valore soglia , è evidente che ci troviamo in una condizione sempre peggiore a quelle precedenti il tempo To sarebbe maggiore al tempo di arrivo del segnale registrato dal geofono con conseguente perdita della parte iniziale del segnale.
caso 7) L'ultimo caso è duello di usare un valore di soglia più alto del valore massimo prodotto dal geofono starter, in tal caso l'acquisizione non parte in quanto la relazione che avvia l'acquisizione non viene verificata.
CONCLUSIONI SULL'USO DEL GEOFONO START
Come si è visto i migliori dati si hanno quando il valore di soglia si pochissimo il rumore del sito quel tanto che basta per far scattare il trigger a causa di un rumore antropico.
Per migliorare la funzionalità del geofono trigger è possibile inserire un circuito che abbia il compito , facendo ruotare una manopola per regolare la sensibilità del trigger in modo da evitare partenze dell'acquisizione, in tutti i casi ciò fa comportare uno delle problematiche dei casi 2-7 precedentemente descritti.
Quanto detto va contro a quanto spesso viene consigliato di dare la mazzata vicino al geofono che si vuole usare come punto di start, in particolare per la mazzata centrale che si solito va data tra il 6 e 7 geofono.
Non è possibile neanche settare il trigger per determiati valori di soglia perchè dipendono
1) dalla caratteristiche del geofono - sensore usato
2) amplificazione e sensibilità del sistema usato
3) intensità della mazzata
4) rumore ambientale
5) energia sviluppata del mezzo battente ( forza applicata )
6) tipo di terreno
7) tipo e dimensioni della piastra
8) distanza dal centro della piastra e il geofono
9 valore di soglia impostato
10) sall'algoritmo utilizzato per gestire l'evento a livello Hardware che software
11) .......... altro ...............
Per ottimizzare ciò occorrono algoritmi software (che penso non vengano utilizzati nei normali strumenti) che eseguano test e verifiche in fase di acquisizione e l'individuazione del vero istante T0 con l'analisi post acquisizione del dato prima della sua visualizzazione, saranno tecniche sperimentate nel programma di acquisizione, in pratica occorre realizzare un " triggeraggio intelligente".
Anche se in maniera meno evidente tutti le tecniche do triggeraggio chi più e chi meno hanno questi problemi più o meno evidenti, per tanto tecniche di triggeraggio intelligenti possono ridurre i margini di errore.

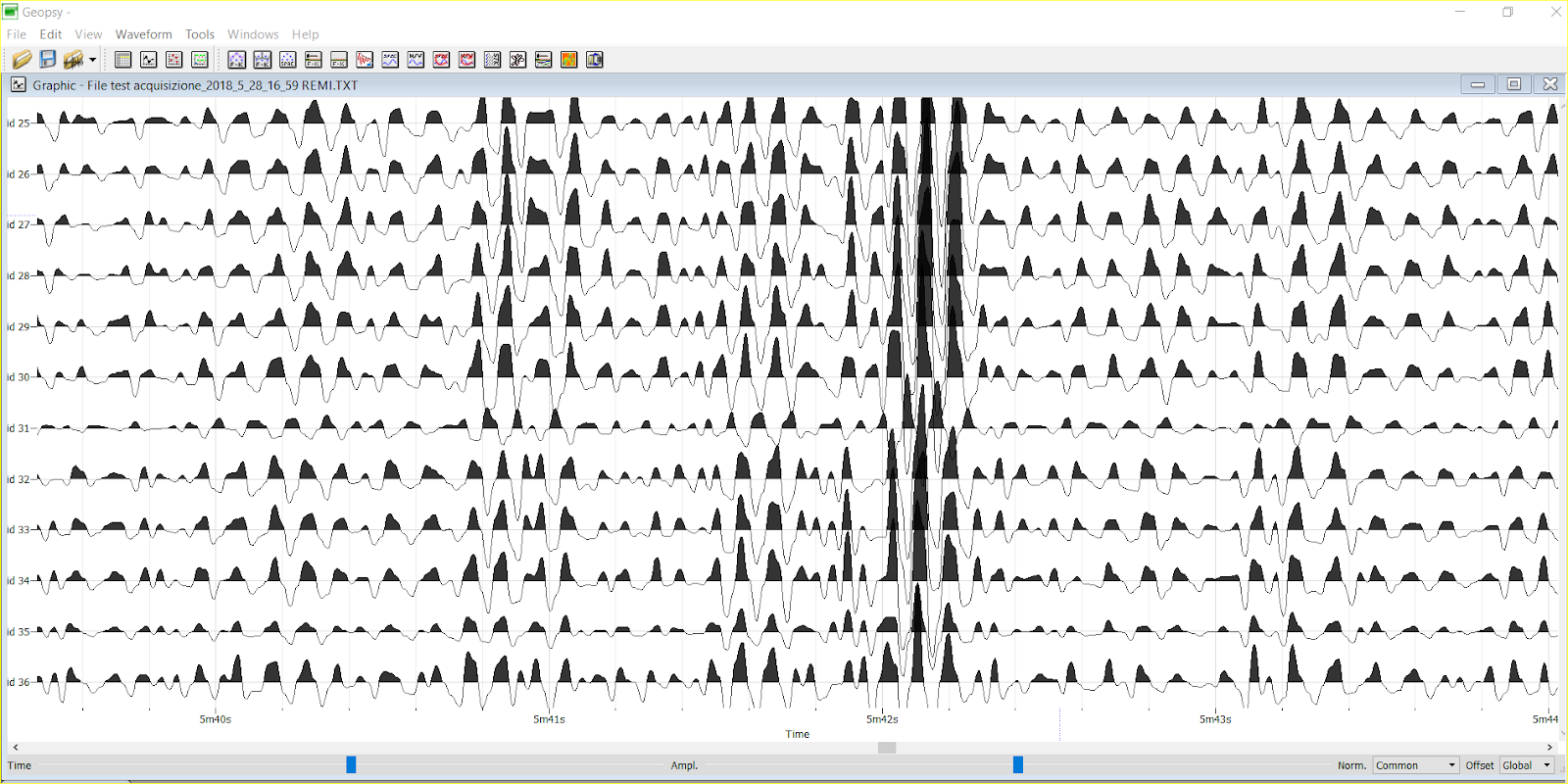
sondaggio eseguito da Simone Sette
Il sondaggio rappresenta la registrazione di circa 20 msec in contemporanea di 5 geofoni verticali posti con distanza intergeofonica di 3 metri, non è stato energizzato il terreno, per misurare l'entità in ampiezza del rumore sismico del sito ( assenza di rumori antropici e vento ).
09-09-2015
L'amico Simone Sette in data odierna mi ha mandato alcune acquisizioni eseguite sul campo di prova,
Il programma ha ancora molte cose da sistemare, si è usato un tabellone elettronico per visualizzare il sondaggio , questo è il risultato ( fatto con acquisitore da 10 euro e una manciata di resistenze e piccoli integrati - un particolare grazie a Simone ) :
cliccare sull'immagig
 ne per ingrandirla
ne per ingrandirla
Attenzione a girare il dischetto piezo fisicamente nel senso giusto in modo che dia il segnale al fronte di salita del colpo e non al fronte di discesa, che arriverebbe qualche millisecondo dopo.

esecuzione di acquisizione Remi di durata 10 minuti ottenuta in continuo - a 2 canali senza interruzioni con visualizzazione del segnale acquisito in tempo reale - frequenza di campionamento
500 hz - progetto in fase di sperimentazione e test
giugno 2018 sperimentazioni fatte dall'amico Salvatore

12-10-2015
CONSIGLI SULL'USO DEI TRIGGER STARTER
dalle prove fatte scarterei i geofoni perché hanno una elevata inerzia per superare il valore di soglia impostato, è possibile a livello di software è possibile ricostruire il tempo To della mazzata ma in condizioni di rumore ambientale o per segnali con ampiezza simile ai rumori ambientali è possibile ottenere risultati errati.
SI SCONDIGLIA DI NON UTILIZZARE I GEOFONI COME STARTER ANCHE CON STRUMENTAZIONI PROFESSIONALI, provate con un geofono e poi con uno starter meccanico e controntate i tempi di arrivo con un geofono medio- lontano......
STARTER GEOFONICO
STARTER MECCANICO
----------------------------------------
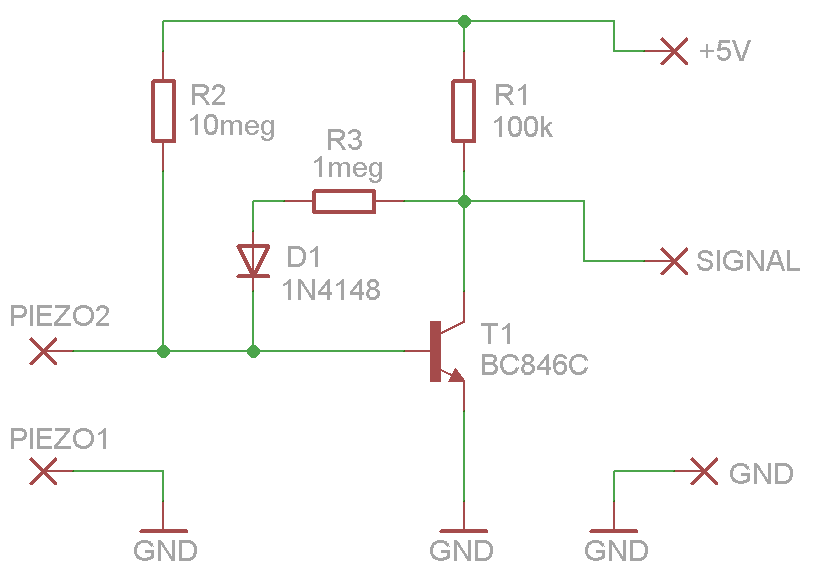
Un eventuale starter meccanico va collegato tra SIGNAL e GND e SENZA collegare il +5V
Poi si deve impostare il PIN come DigIn-PU (il PU vuol dire PULL-UP e ci pensa il Theremino a dare la tensione che serve all’interruttore)
STARTER PIEZOELETTRICO
----------------------------------------
Consiglio questa versione perché costa poco e da un segnale forte e pulito.
In questo caso il segnale partirebbe da numeri bassi (da 5 a 20) e sicuramente sotto al 500.
E salirebbe a 800 o 900 in tempo brevissimo ad ogni mazzata.
Adattatori per i sensori piezoelettrici
da theremino.com
da theremino.com
Gli adattatori che proponiamo sono semplici da costruire e funzionano meglio dei molti schemi che si trovano su internet.
Attenzione: Il principio di funzionamento dei nostri sensori non è lo stesso di quelli delle batterie commerciali. I segnali non sono intercambiabili.
Per ottenere le massime prestazioni, i nostri sensori non trasmettono un segnale audio, ma un valore proporzionale alla pressione esercitata.
Questo ci ha permessi di ottenere un controllo del suono e una dinamica, superiori a quelli delle batterie elettroniche commerciali, con i classici Pad non alimentati.
continua nel sito
per ulteriori informazioni si rimanda alla seguente interessantissima pagina
http://www.theremino.com/hardware/inputs/piezoelectric-sensors#adapters
per ulteriori informazioni si rimanda alla seguente interessantissima pagina
http://www.theremino.com/hardware/inputs/piezoelectric-sensors#adapters

Attenzione a girare il dischetto piezo fisicamente nel senso giusto in modo che dia il segnale al fronte di salita del colpo e non al fronte di discesa, che arriverebbe qualche millisecondo dopo.
500 hz - progetto in fase di sperimentazione e test
giugno 2018 sperimentazioni fatte dall'amico Salvatore
domenica 9 dicembre 2018
Programmatore di PIC - THEREMINO

Un utile accessorio , programmatore pic per aggiornare il software implementato nel master THEREMINO
Programmare i processori PIC con i file HEX


I file HEX (e anche i progetti completi) si scaricano dalla pagina: technical/schematics
I micro-controllori usati nel sistema Theremino sono:
– PIC24FJ64GB002 (tutti i Master, dal 2012 al 2015)
– PIC24FJ128GB202 (futuri Master con 12 o 13 InOut e 2 bit in più negli ADC)
– PIC32MX110F016 (futuri Master a 32 bit) (Nota 1)
– PIC24F16KA101 (tutti gli slaves, Servo e CapSensor)
(Nota 1) Probabilmente non useremo i modelli a 32 bit perché, oltre a non dare reali vantaggi in velocità e precisione, limitano la posizione dei Pin della seriale. Preferiamo invece usare i nuovi PIC della serie 24, che permetteranno 12 o anche 13 Pin e che contengono i nuovi ADC, quattro volte più precisi.
domenica 2 dicembre 2018
PARTE 3° SETTAGGIO TROMOGRAFO 24 BIT
PARTE 3°
MANUALE HAL PER THEREMINO MASTER ADC24 BIT
PER PER PROVE HVSR

MENU IMPORTANTI
SETTAGGIO DI HAL PER HVSR
per accedere alle modifiche alla prima installazione occorre cliccare sul pin 7 . si aprirà una finestra che permetterà di avvedere al settaggio dell'ASC 24 BIT
versione autocostruito

sattaggio programma Hal
- per convenzione
- il canale 1 correisponde al geofono verticale
- il canale 2 corrispnde al geofono nord/sud
- il canale 3 corrispnde al geofono est/ovest
settare velocità =12
per pc lenti limitare la frequenza massima di acquisizione 120 200 250 330 400 500 in base al valore di ripetizione che nel caso specifico è di 775 per cui si può usare frequenza di campionamento ( software di acquisizione ) sempre inferiore, in questo caso il massimo sarà 500 hz < 775,
con ripetizione ( esempio di 459 ) la frequenza di campionamento dovrà scendere a 400 hz




menu di di settaggio del programma di acquisizione Theremino Dolfrang

Tutti i settaggi in fase si acquisizione non possono essere variati, è possibile modificare solamente suelli di visualizzazione.
come frequenza di visualizzazione si consiglia di usare 10 hz per non consumare troppa cpu se il pc è lento
come frequenza di visualizzazione si consiglia di usare 10 hz per non consumare troppa cpu se il pc è lento
ATTENZIONE , nella finestra GUADAGNO IN TENSIONE occorre inserire manualmente il valore settato come gain mel menu di Hal, i due programmi non dialogano tra loro per cui il settaggio deve essere fatto manualmente .
- per convenzione
- il canale 1 correisponde al geofono nord/sud
- il canale 2 corrispnde al geofono est/ovest
- il canale 3 corrispnde al geofono verticale

in tal caso agendo sui menu a tendina modificare l'ordine della sequenza dei geofoni.
Tale modifica anche se non influisce sul risultato del calcolo, serve solo per memorizzare uul report del file saf la posizione dei geofoni nel giusto ordine
Tale modifica anche se non influisce sul risultato del calcolo, serve solo per memorizzare uul report del file saf la posizione dei geofoni nel giusto ordine

I sottostanti valori di settaggio in caso di diversità da quelli sopra indicati non vanno considerati.
Nei casi in cui avviato Hal non risponde cliccare su RECOGNIZE e/o VALIDATE
SETTAGGI ANCORA DA RIVEDERE ( si consiglia di accedere a questa pagina per vedere le eventuali modifiche che con il proseguo delle sperimentazioni possono essere fatte.
SETTAGGI ANCORA DA RIVEDERE ( si consiglia di accedere a questa pagina per vedere le eventuali modifiche che con il proseguo delle sperimentazioni possono essere fatte.
CONFIGURAZIONE di HAL
( vedere manuale Pdf Sistema theremino - Theremino_ADC24 - 28 giugno 2016 - Pagina 28 )
1) SETTAGGIO PIN 7
Va configurato come DIFFERENZIALE
filtro MAX SPEED
RESPONSE SPEED
con frequenza acquisizione = 500 HZ SPEED = 1500 per Pc veloci
con frequenza acquisizione = 333 HZ SPEED = 1200 per Pc medi
con frequenza acquisizione = 250 HZ SPEED = 1200 per Pc medio lenti
con frequenza acquisizione = 200 HZ SPEED = 1000 per Pc lenti
se possibile non usare frequenze al di sotto si 250 hz in quanto si otterrebbero meno dati validi e in tutti i casi non si avrebbero dati utili tra 0 - 2/5 metri di profondità
2) SETTAGGIO PIN 8 - nulla da modificare
3) SETTAGGIO PIN 9 - nulla da modificare
Il menu di Theremino Hal dopo aver apportato le modifiche dovrà apparire cosi:
1) SETTAGGIO PIN 7
Va configurato come DIFFERENZIALE
filtro MAX SPEED
RESPONSE SPEED
con frequenza acquisizione = 500 HZ SPEED = 1500 per Pc veloci
con frequenza acquisizione = 333 HZ SPEED = 1200 per Pc medi
con frequenza acquisizione = 250 HZ SPEED = 1200 per Pc medio lenti
con frequenza acquisizione = 200 HZ SPEED = 1000 per Pc lenti
se possibile non usare frequenze al di sotto si 250 hz in quanto si otterrebbero meno dati validi e in tutti i casi non si avrebbero dati utili tra 0 - 2/5 metri di profondità
2) SETTAGGIO PIN 8 - nulla da modificare
3) SETTAGGIO PIN 9 - nulla da modificare
Il menu di Theremino Hal dopo aver apportato le modifiche dovrà apparire cosi:
Type Id subtype Dir Sloot Value
Master 1 Nome
Slave 1 Master Type
Pin 1 Unused
Pin 2 Unused
Pin 3 Unused
Pin 4 Unused
Pin 5 Unused
Pin 6 Unused
Pin 7 Adc_24 per attivare il 24 bit
Pin 8 Adc_24_din
Pin 9 Adc_24_dout get 9 per gestire il filtraggio e altri parametri
Pin 10 Unused
Pin 11 Unused
Pin 12 Unused
Pin 10 Unused
Pin 11 Unused
Pin 12 Unused
ADC24 1 Adc_24_ch get 1 asse z verticale differenziale
ADC24 6 Adc_24_ch_b 6 asse est - ovest differenziale
ADC24 7 Unused
ADC24 2 Adc_24_ch_b 2 asse z verticale differenziale
ADC24 3 Adc_24_ch get 3 asse nord - sud differenziale
ADC24 4 Adc_24_ch_b 4 asse nord - sud differenziale
ADC24 5 Adc_24_ch get 5 asse est - ovest differenzialeADC24 6 Adc_24_ch_b 6 asse est - ovest differenziale
ADC24 8 Unused
ADC24 9 Unused
ADC24 10 Unused
ADC24 11 Unused
ADC24 12 Unused
ADC24 13 Unused
ADC24 14 Unused
ADC24 15 Unused
ADC24 16 Unused
PROPRIETA' DEL MASTER
1) COM SPEED usare 12 per l'HVSR
2) I PIN TYPE devono essere settati come ADC24
3) SLOT devono essere numeri progressivi da
CH 1 A PIN 1
CH 1 B PIN 2
CH 1 B PIN 2
CH 2 A PIN 3
CH 2 B PIN 4
CH 2 B PIN 4
CH 3 A PIN 5
CH 3 B PIN 6
CH 3 B PIN 6
4) MAX VALUE per convenzione usare 3.3 in questo modo i valori verranno registrati in volt
5) MIN VALUE per convenzione usare il valore = - 3.3
6) GAIN - usare sempre gain = 128
Il valore di gain utilizzato va impostato sul menu di acquisizione del programma Theremino Dolfrang dell' HVSR - i valori del programma di acquisizione e di hal non iteragiscono per cui è necessario intervenire manualmente gli stessi valori nei due programmi.
Inviare le prime acquisizioni a dolfrang @ libero . it per verificare la bontà dei settaggi, allegare un jpg con i principali settaggi impostati e una prova saf di 30 minuti. indicando condizioni antropiche e ambientali e stratigrafia di massima.
Caratteristiche del Theremino Adc24
per utilizzo in differenziale
misure microtremori e Sidmologia
Alimentazione: 5 Vdc
Consumo di energia: < 5 millesimi di Watt (900 uA a 5 Volt)
Numero di canali: Da 1 a 16 canali a 24 bit (Σ-Δ) (8 differenziali, 15 pseudo o 16 single ended)
Range dinamico: 127 dB @ 100 SPS (con tre canali contemporanei e guadagno 1)
Campionamento: Configurabile da 1 a 16 canali “Differenziali”, “Pseudo” o “Single Ended”
Sampling rate: Da 10 a 19200 campionamenti al secondo
Fondo scala: +/- 3.3 Vpp (Differenziale) oppure da 0 a 3.3 Volt (Pseudo e Single)
Adc step (x 1): 0.4 uV (Differenziale) - 0.2 uV (Pseudo e Single)
Adc step (x 128): 3.2 nV (Differenziale) - 1.6 nV (Pseudo e Single)
Impedenza di input: Praticamente infinita (> 100 mega ohm)
Corrente di input: Inferiore a +/- 4 nA
Corrente di input: Variazione con la temperatura +/-25 pA/°C
Tensione Massima: Da -0.3 Volt a +3.6 Volt (tensione massima applicabile agli ingressi)
Corrente Massima: +/-10 mA (corrente massima applicabile agli ingressi)
ESD Rating HBM: Human Body Model = 4 kV
ESD Rating FICDM: Field-Induced Charged Device Model = 1250 V
ESD Rating MM: Machine Model = 400 V
Uscita 3.3 Volt: Fino a 300 mA, accuratezza (1%), stabilità (48 ppm/°C).
Uscita 2.5 Volt: Fino a 10 mA, accuratezza (0.2%), stabilità (2 ppm/°C tipica).
Uscita 1.6 Volt: Solo per polarizzare i sensori (accuratezza e stabilità pari al 3.3 Volt / 2).
Interfaccia dati: SPI a tre fili, QSPI™, MICROWIRE™ e DSP
Formato dati: Protocollo di Analog Devices (vedere data-sheet dello AD7124-8)
Velocità linea seriale: Da 30 baud a 5 mega baud
Precisione di tempo: Circa 500 uS o inferiore
Temperatura: Da −40°C a +105°C (funzionale)
Temperatura: Da −65°C a +150°C (in magazzino) Dimensioni: 60 x 34 x 12 mm
Conformità: Nessuna certificazione, è un componente quindi non certificabile